
독립적으로 제어되는 셔틀이 있는 지능형 수송 시스템이 배치 사이즈 원의 대량 생산을 위한 길을 닦고 있다. 배치 사이즈 원의 대량 생산을 구현할 때, 셔틀 이동을 프로그래밍하는 과정에서 발생하는 오버헤드의 양은 적지 않다. 이 오버헤드를 대폭 줄여서 제대로 작동하게 하는 유일한 방법은 B&R의 mapp Trak과 같은 지능형 시스템 소프트웨어를 사용하는 것이다.

특성이 있는 제품은 단순히 사람들의 이목을 끄는 신기한 물건으로만 볼 수는 없다. 소비자들로부터 제품을 소유하고자 하는 깊숙한 욕망을 일깨울 수 있는 정도는 되어야 특성이 있는 제품이라 할 수 있다. 점점 더 많은 제조사들이 그들의 공장에 지능형의, 트랙 기반 수송 시스템을 설치함으로써 대량 맞춤화를 통한 수익 점유율의 확보를 시도하고 있다. 그러나 대량 맞춤화는 트랙 시스템이 제품 변형이나 완전히 새로운 제품을 신속하고도 저렴하게 수용하는 데 충분할 만큼 유연성이 있는 경우에만 가능하다.
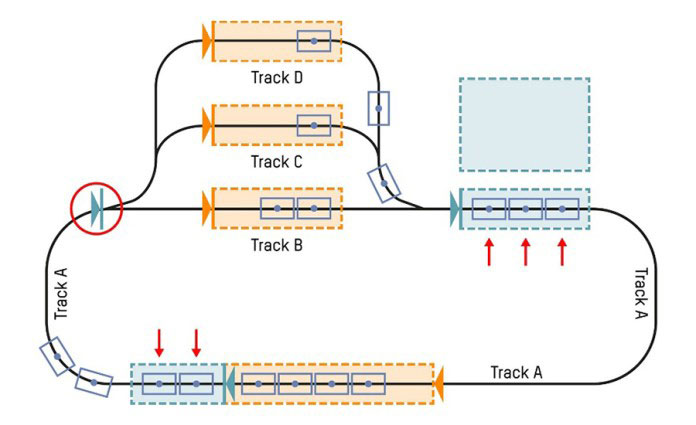
![]() B&R의 지능형 ACOPOStrak 수송 시스템은 정확히 이 요구를 충족시킨다. 시스템은 모듈형 구조로 설계되어 있다. 실질적으로 어떠한 레이아웃으로도 변형할 수 있고 언제든지 용이하게 적응 및 확장이 가능한 4개의 기본 트랙 요소와 다이버터가 있다. 전자기적으로 구동되는 셔틀은 같은 다이버터의 양쪽에 위치하더라도 독립적으로 제어가 가능하다.
B&R의 지능형 ACOPOStrak 수송 시스템은 정확히 이 요구를 충족시킨다. 시스템은 모듈형 구조로 설계되어 있다. 실질적으로 어떠한 레이아웃으로도 변형할 수 있고 언제든지 용이하게 적응 및 확장이 가능한 4개의 기본 트랙 요소와 다이버터가 있다. 전자기적으로 구동되는 셔틀은 같은 다이버터의 양쪽에 위치하더라도 독립적으로 제어가 가능하다.
뛰어난 확장성을 갖춘 시스템 구조는 트랙 길이가 100미터를 넘고 수백 개의 셔틀이 있는 레이아웃에도 적용될 수 있다. 게다가, “트랙 시스템의 복잡한 구성에도 불구하고 사용이 용이하다”고 B&R의 메카트로닉 기술 부장 Robert Kickinger는 설명한다. B&R은 기계 제작자와 제조 기업들이 그들의 제품을 가능한 한 신속히 출시하는 데 도움을 주기 위해 ACOPOStrak 솔루션의 엔지니어링 프로세스를 단순화하였다. “엔지니어링 작업의 양과 관련된 비용을 최소화하면, 또는 매력적인 투자 수익률이 달성될 수 있습니다.” Kickinger는 덧붙인다.
충돌 없는 트랙
충돌 없는 트랙 설계를 위하여 OEM 업체나 기계 운영자에게 필요한 것은 ACOPOStrak 시스템에 수반되는 mapp Trak 시스템 소프트웨어이다. “이 소프트웨어는 당사의 개발 입안자들의 작품입니다.” 이 메카트로닉 전문가는 설명한다. 설계자들은 핵심적인 ACOPOStrak 기능 뒤에 숨겨진 복잡한 수학적 작업을 마스터하였으며, 여기에는 충돌 회피, 최대 속도에서 제품 흐름의 분할과 통합, 그리고 최적 경로의 계산이 포함된다.
어플리케이션 개발자들은 충돌에 대한 걱정으로부터 해방되어 귀중한 엔지니어링 시간을 절약할 수 있다. 크기나 무게가 달라도 충돌 위험은 없다. 제품 크기는 수동으로 설정되거나 센서를 사용하여 측정할 수 있고, mapp Trak은 충돌을 방지하기 위해 셔틀 제어 장치를 자동으로 조정한다.
프로세스 지향적 프로그래밍
엔지니어링 프로세스를 더욱 단순화시키는 두 번째 요인은 프로세스 지향적 프로그래밍이다. 어플리케이션 소프트웨어 엔지니어는 mapp Trak을 이용하여 셔틀이 트랙 상에서 어떻게 거동해야 하는지에 대한 규칙을 정한다. 규칙은 셔틀이 가상 트리거 포인트를 통과하면 활성화된다. 상태 기계(state machines)를 기반을 하는 이 단순한 방법은 시퀀스의 구현을 극히 효율적으로 만든다.
ACOPOStrak을 이용하면 각 셔틀에 대한 축과 모션 프로필을 개별적으로 프로그래밍할 필요가 없다. 수백 개의 셔틀과 다수의 가능한 경로가 관련되는 경우에 이것은 엄두도 못 낼 만큼 많은 시간이 소요되는 작업이다. 프로세스 지향적 프로그래밍의 추가적인 편익은 어플리케이션 소프트웨어를 전혀 변경하지 않고도 셔틀을 트랙에서 제거하고 추가할 수 있다는 점이다.
효율적인 작동을 위한 시뮬레이션
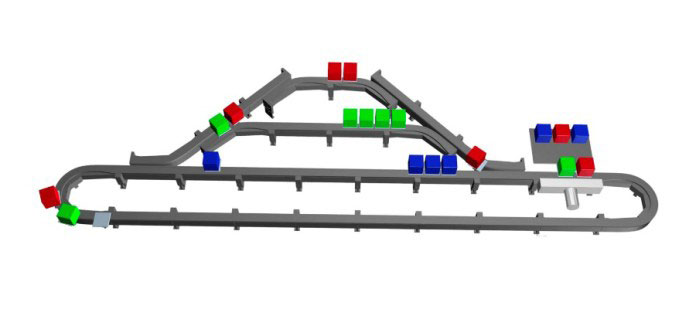
mapp Trak에 통합된 시뮬레이션 기능은 시스템이 순조롭게 작동할 것이라는 명확한 시각적 확인을 제공한다. 개발자들은 몇 개의 셔틀을 사용하여 어떤 속도에서 어플리케이션이 최고의 생산성을 제공해줄 것인지를 시험할 수 있다. “개발자들은 실제 시스템의 제약과 위험부담 없이 그들의 사무실 PC 상에서 많은 시나리오를 돌려볼 수 있습니다.” B&R 트랙시스템 프로젝트 부장 Migliorisi는 말한다. 소프트웨어는 나중에 컨트롤러에서 사용되는 시스템 소프트웨어와 동일하다. 언제든지 시뮬레이션과 실제 작동 사이를 앞뒤로 전환하는 것이 가능하다.
또한 Scene Viewer로 라벨 부착 기계 또는 로봇과 같은 추가적인 기계 요소들과 어떻게 상호 작용하는지를 가시화하는 것도 가능하다. 해야 할 일은 각 기계 요소들의 STEP 파일을 가져오기(import)하고 공간에서 시간의 흐름에 따라 그의 움직임을 모형화(model)하는 것뿐이다. 이것은 개발자들로 하여금 트랙의 시뮬레이션뿐만 아니라 추가적인 기계 요소와의 상호작용도 수행할 수 있도록 한다. “우리 고객들이 그토록 마음에 들어 하는 것은 mapp Trak의 시뮬레이션 능력의 실천적 지향(practical orientation)입니다.” Migliorisi는 확인하듯 말한다.
“그리고 외부 기계 요소와의 상호작용도 매우 원활합니다.” 그는 덧붙인다. “ACOPOStrak은 ACOPOS 서보 드라이브 제품군으로 구성되어 있기 때문입니다.” ACOPOS 제품군은 단일 축 또는 다축 시스템의 작동을 위한 복잡한 기능과 함께, 축 연동에 대한 광범위한 옵션을 갖추고 있다.
그에 따라 셔틀들은 PLCopen 명령을 이용하여 ACOPOS 서보 드라이브에 의해 구동되는 축들과 밀접하게 조정되고, Scene Viewer에서 디지털 쌍둥이처럼 표시된다.
최대한의 유연성
ACOPOStrak이 사용하기 쉽다는 것은 이미 고객들에 의해 입증되었다. Kickinger는 “한 고객이 기존의 기계를 ACOPOStrak을 이용하여 추가적인 리니어 모터 구간을 확장시키고 소프트웨어 개발 작업 15분 만에 기계에 전원을 투입하고 가동시켰다”고 설명한다. 이것은 하드웨어로부터 분리된 ACOPOStrak의 프로그래밍 개념의 강점을 인상적으로 보여주는 사례이다.
mapp Trak 시스템 소프트웨어를 사용하면, 제품 데이터를 각 제품이 현재 위치하고 있는 셔틀에 명확히 연계시킬 수 있다. “이것은 사용자에게 최고 수준의 유연성을 제공하는 것입니다.” Kickinger는 말한다. 예를 들어서 제약 생산 라인의 특정 제품 데이터 기록에는 활성 성분의 정확한 구성과 고유한 제품 ID가 포함될 수 있다. 또한 각 제품이 각 처리 스테이션을 통과한 날짜와 시간을 저장하는 것도 가능하다. 이렇게 되면 어플리케이션 엔지니어는 FDA를 준수하는 트랙킹도 쉽게 구현할 수 있다.
관리 가능한 복잡성
mapp Trak은 세 가지를 보장한다. 첫째, 셔틀이 충돌하지 않고, 둘째, 셔틀이 가상 장벽을 넘지 않고, 셋째, 설정 가능한 속도 제한이 준수된다. 이러한 보장과 프로세스 지향적 프로그래밍 그리고 소프트웨어에 포함된 시뮬레이션 기능을 통해 B&R은 유연한 ACOPOStrak 수송 시스템의 복잡성을 사용자가 아주 쉽게 사용할 수 있도록 만들었다. 이것은 또한 ACOPOStrak 제품 라인의 신제품을 어떠한 배치(batch) 규모에도 적은 인력과 출시 기간을 최적화하는 것을 가능하게 한다. 이것은 단기간 내에 신규 생산 주문을 따내는 데 있어서 중요한 요소이다.
mapp Trak 구조
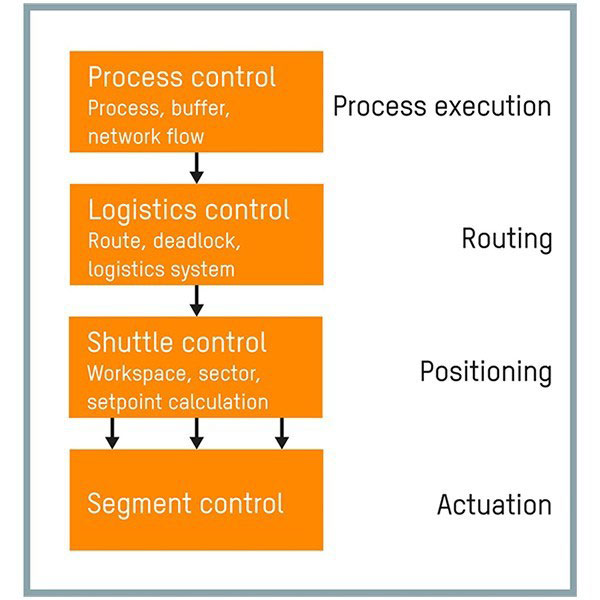
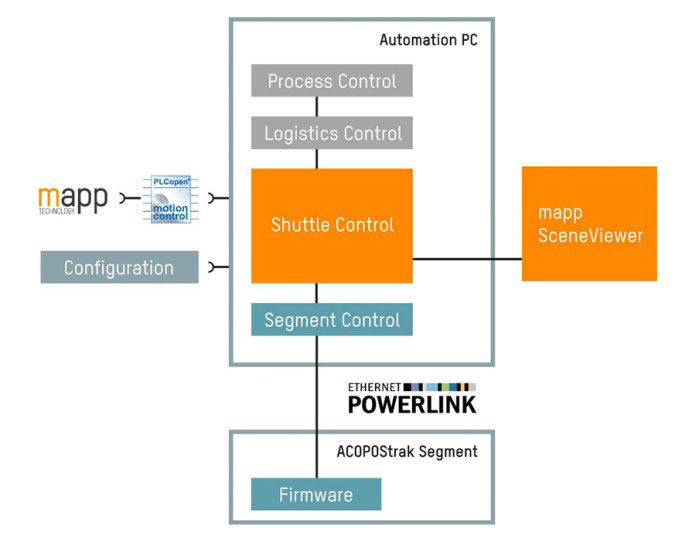
mapp Trak의 소프트웨어 구조는 네 가지 기본 레벨로 나누어진다. 가장 낮은 레벨은 구간(segment) 제어 레벨로써 각 구간에 위치한 셔틀의 움직임을 제어한다.
바로 위의 계층인 셔틀 제어 레벨은 셔틀에 대한 위치 설정점과 같은 것들이 계산되는 레벨이다. 만약 어플리케이션 엔지니어가 예를 들어 PLC 기능 블록을 이용하여 셔틀을 외부 축이나 다른 셔틀에 연결시키고자 한다면 바로 이 레벨에서 이루어진다. 이것은 또한 예를 들어 ACOPOStrak이 구식 컨베이어 벨트와 조합되어 사용되거나 혹은 셔틀이 사람이나 로봇에 의해 추가되거나 제거될 때 트랙에 추가되거나 제거되는 셔틀을 다루는 레벨이다.
세 번째 레벨인 물류 제어 레벨에서는 소프트웨어 요소들이 A 처리 스테이션에서 B처리 스테이션으로의 자동화된 경로를 제공한다. 네 번째 레벨은 프로세스 제어 전용이다. 또한 이 레벨은 소프트웨어 엔지니어가 프로세스 흐름을 기술하는 프로그래밍 인터페이스를 대표한다.
저자: Carmen Klingler-Deiseroth, 프리랜서 저널리스트 / 제공. B&R 코리아





![[진단] 테솔로 IPO가 던지는 의미… 피지컬 AI 시대, 로봇핸드가 새로운 AI 반도체가 된다](https://icnweb.kr/wp-content/uploads/2026/06/DG-5F-S-tesollo-robot-hand-1024x683.jpg "[진단] 테솔로 IPO가 던지는 의미… 피지컬 AI 시대, 로봇핸드가 새로운 AI 반도체가 된다")
![[분석] SEMI, AI가 메모리 투자 판도 바꾼다](https://icnweb.kr/wp-content/uploads/2026/06/semi-300mm-fab-Equip-spending-1Q-2026-icnweb.png "[분석] SEMI, AI가 메모리 투자 판도 바꾼다")

![[진단] 빅테크 동맹 이끈 매터, 스마트홈 넘어 스마트빌딩 공용 언어 되다](https://icnweb.kr/wp-content/uploads/2026/06/matter-at-building-900web.png "[진단] 빅테크 동맹 이끈 매터, 스마트홈 넘어 스마트빌딩 공용 언어 되다")









")







{kind=link}