
글로벌 LiDAR 시장은 2016년 14억 2,970만 달러를 기록했다. 2017-2022년에는 25.8%의 연평균 성장률(CAGR)로 성장하여 2022년에는 52억 480만 달러에 달할 것으로 기대된다. 주요 시장 성장요인으로 각국 정부의 보급 지원책, ADAS용 및 자동차용 이용 증가 등을 들 수 있다. 자율주행차를 위한 라이다 기술의 현황과 기술 동향을 알아 본다.
 기술")
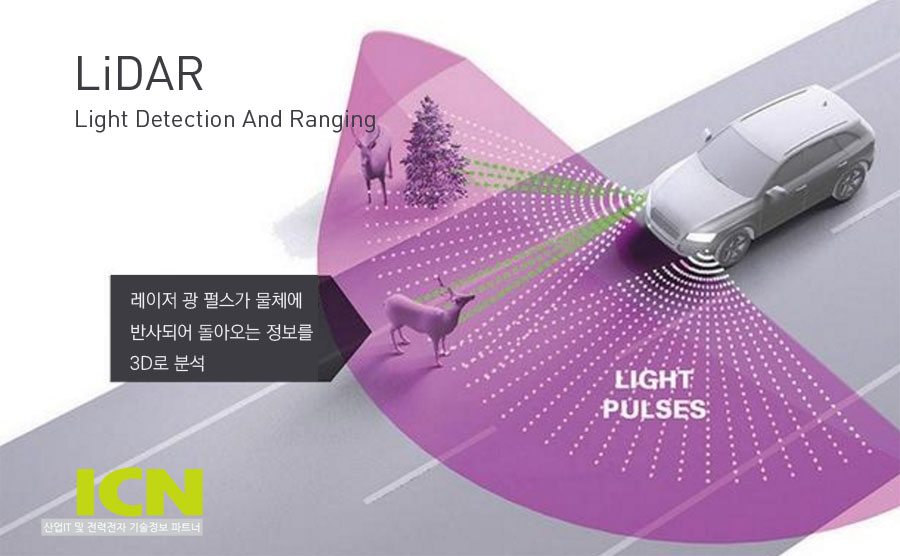
라이다 센서는 레이저를 목표물에 비춤으로써 사물까 지의 거리, 방향, 속도, 온도, 물질 분포 및 농도 특성 등을 감지할 수 있는 기술이다. 라이다 센서는 일반적으 로 높은 에너지 밀도와 짧은 주기를 가지는 펄스 신호를 생성할 수 있는 레이저의 장점을 활용하여 보다 정밀한 대기 중의 물성 관측 및 거리 측정 등에 활용된다.
라이다 센서 기술은 탐조등 빛의 산란 세기를 통하여 상공에서의 공기 밀도 분석 등을 위한 목적으로 1930년 대 처음 시도되었으나, 1960년대 레이저의 발명과 함께 비로소 본격적인 개발이 가능하였다. 1970년대 이후 레이저 광원 기술의 지속적인 발전과 함께 다양한 분야에 응용 가능한 라이다 센서 기술들이 개발되었다. 항공기, 위성 등에 탑재되어 정밀한 대기 분석 및 지구환경 관측을 위한 중요한 관측 기술로 활용되고 있으며, 또한 우주선 및 탐사 로봇에 장착되어 사물까지의 거리 측정 등 카메라 기능을 보완하기 위한 수단으로 활용되고 있다.
지상에서는 원거리 거리 측정, 자동차 속도 위반 단속 등을 위한 간단한 형태의 라이다 센서 기술들이 상용화되어 왔으며, 최근에는 3D reverse engineering 및 미 래 무인자동차를 위한 laser scanner 및 3D 영상 카메라의 핵심 기술로 활용되면서 그 활용성과 중요성이 점차 증가되고 있다. 라이다 센서 기술은 이러한 광범위한 분야에서의 응용에도 불구하고, 미국, 유럽 및 일본에 비하여 우주 및 지구 과학분야의 발전이 상대적으로 미약한 국내에서는 그 동안 크게 주목 받지 못한 관계로 관련 핵심 기술의 확보가 아직 미약한 수준이다.
현대 라이다 기술은 1960년대 초 레이저가 발명되고, laser의 초점 이미지와 신호가 돌아오는데 걸리는 시간을 측정함으로써 거리를 계산하는 radar(Radio Detection And Ranging: RADAR)기술이 결합되면서 급속하게 발전하였다. ‘lidar’ 어원도 light와 radar의 합성어로 1963년에 처음 사용되었다. 그 후 1970년 초 보다 넓은 의미가 있는 ‘LIght Detection And Ranging’ 또는 레이저 광원을 활용하는 ‘Laser Imaging, Detection and Ranging’의 약자로 LIDAR 용어가 사용되었다.
라이다의 기본 원리
라이다 센서 시스템의 구성은 응용 분야에 따라 때로는 매우 복잡하게 구성되지만, 기본적인 구성은 그림1에서 보인 바와 같이 레이저 송신부, 레이저 검출부, 신호 수집 및 처리와 데이터를 송수신하기 위한 부분으로 단순하게 구분될 수 있다. 아울러 라이다 센서는 레이저 신호의 변조 방법에 따라 time-of-flight(TOF) 방식과 phase-shift 방식으로 구분될 수 있다.

TOF 방식은 레이저가 펄스 신호를 방출하여 측정 범위 내에 있는 물체들로부터의 반사 펄스 신호들 이 수신기에 도착하는 시간을 측정함으로써 거리를 측정하는 것이 가능하다. Phase-shift 방식은 특정 주파수를 가지고 연속적으로 변조되는 레이저 빔을 방출하 고 측정 범위 내에 있는 물체로부터 반사되어 되돌아 오는 신호의 위상 변화량을 측정하여 시간 및 거리를 계산하는 방식이다. 레이저 광원은 250nm부터 11μm까지의 파장 영역에서 특정 파장을 가지거나 파장 가변이 가능한 레이저 광원들이 사용되며, 최근에는 소형, 저전력이 가능한 반도체 레이저 다이오드가 많이 사용된다.
특히, 레이저의 파장은 대기, 구름, 비 등에 대한 투과성과 eye-safety에 직접적인 영향을 준다. 기본적으로 레이저 출력, 파장, 스펙트럼 특성, 펄스폭 및 모양 등과 함께 수신기의 수신감도 및 다이내믹 레인지, 그리고 광학필터 및 렌즈의 특성이 라이다의 성능을 결정하는 주요 요인이다. 이와 함께 수신기의 측정 각도를 나타내는 Field Of View (FOV), 측정 범위를 선택하기 위한 field stop, 레이저 빔과 수신기의 FOV overlap 특성 등도 중요한 항목이다.
광속에 대하여 단위 데이터 수집을 위한 최소 시간은 거리 분해능(range resolution)을 결정하는 요인이며, 따라서 1m 이하의 거리 분해능을 위해서는 수 ns 이내의 데이터 수집 및 처리가 요구된다.
자율주행차와 스마트카를 위한 라이다 기술
2010년 이후로 자율주행차 및 스마트카 분야는 구글, 애플, 테슬러 모터스, 우버, 크루즈 오토메이션, 뉴토노미, 리프트 등의 다양한 글로벌 IT업체와 토요다, 현대자동차, BMW, 메르세데스, 볼보, 지엠, 포드 등 완성차 업체가 다양한 방식으로 서비스 시연 및 연구개발을 하면서 더욱 뜨겁게 이슈가 되고 있는 분야이다. 자율주행차 및 스마트카 기술이 뜨겁게 떠오르면서 다양한 상황인지 센서 기술들도 급속하게 발전하고 있다.
특히 자율주행 기술을 연구하는 모든 차량에는 핵심 센서 기술로 라이다가 채택되어 있고, 구글, 포드, GM 등은 높은 해상도의 3차원 위치 정보를 확보하기 위해 고해상도 라이다 센서모듈을 적용하거나 저해상도 라이다 센서모듈을 다수로 배치하여 고해상도 영상 정보를 3차원으로 검출하고 있으며, 추가적인 성능 개선 및 요구사항 만족을 위해 다양한 방식의 실외용 라이다 기술을 적극적으로 활용하고 있다.
실제 도로에서 자동차 자율주행 기술을 시연하고, 기술적으로도 가장 진보한 기술을 확보한 구글 자율주행차 기술의 성공은 인공지능, 기계학습 그리고 딥러닝과 관련된 소프트웨어 설계능력에 기반한 것이지만, 소프트웨어의 구동에 필수적이면서도 우수한 성능을 확보하는데 핵심적인 데이타는 주변상황에 대한 3차원 영상센서에 의하여 획득된다.
현재 관련업계에서 자율이동 및 자율주행을 지원하기 위해 기술적 개선의 필요성이 가장 큰 요소로 평가되는 것은 해상도와 센서모듈 가격이다. 즉 최소 비용으로 주변 공간에 대한 최대 분해능의 3차원 정보 획득을 요구하고 있다. 기존의 센서들로는 이러한 높은 수준의 분해능으로 3차원 공간정보를 확보하기 어렵기 때문에 라이다 기술이 자율주행 자동차 시대의 핵심 센서로 인식되고 있다. 실제 요구되는 성능 및 가격 조건은 자율주행 레벨 및 애플리케이션에 따라서 다르지만 차량용 라이다 센서는 주.야간 구분 없이 100m 이상 범위의 주변상황에 대한 고해상도 3차원 공간정보 검출이 가능하도록 해야 한다.
차량 및 보행자의 안정성 확보를 위하여 충분한 정보(Redundancy)를 제공하는 것은 매우 중요하다. 빛을 조사 후 검출하는 액티브 방식 라이다 기술과 더불어 차량에 탑재된 다양한 센서 기술들을 조합하여 함께 활용하면 매우 우수하면서 안정성 있는 센서 기술을 제공할 수 있지만, 라이다 기술이 제공하는 공간 분해능은 다른 센서 기술의 조합으로도 확보하기 어려운 성능으로 자율주행 자동차의 다양한 센서 중에서 라이다 센서기술은 전략적으로 매우 중요한 요소이다.

구글 자율주행차의 성공은 바로 이러한 요소를 파악하여, 개발 초기에 우수한 공간 분해능의 정보를 제공하는 라이다 모듈(실제로 적용된 모델은 Velodyne사의 HDL-64 모델)의 특징을 충분히 활용하였고, 이를 중심으로 하여 관련 자율주행 소프트웨어 기술을 비약적으로 발전시켰기 때문에 빠른 시간에 성공적인 시연이 가능하였다.
이와 같은 글로벌 IT 기업이 자율주행 자동차 분야에서 이룬 기술혁명은 기존 글로벌 완성차 기업과 산업에도 커다란 자극이 되었으며, 이는 기존에 존재하던 차량의 첨단운전보조시스템(Advanced Driver Assistance Systems: ADAS)을 더욱 발전시켜 자율주행 기능을 가속화하는 방향으로 연구개발 및 관련 투자를 이끌어내고 있다.
특히 고속도로에서 자동차선 변경 등의 기능을 지원하면서 레이다와 비젼을 사용하던 기존 방식으로는 자율주행을 위한 성능이 충분하지 않아 글로벌 IT기업과 동일하게 라이다 기술을 필수적으로 채택하고 있다. 다만 비교적 단순한 수준의 자율주행에는 상대적으로 낮은 성능의 저가격 저해상도 라이다가 활용되는 추세이다.
글로벌 차량용 라이다 기술 그룹
원격 탐지(Remote Sensing) 방식으로 전방 또는 주변 공간에 대한 3차원 정보를 획득하는 라이다 기술은 다양한 방식으로 구현할 수 있다. 레이저(빛)를 조사하는 능동형 라이다 기술과 레이저를 조사하지 않는 수동형 라이다 기술로 나누어질 수 있는데, 본고에서는 주야간 모두 사용해야 하는 차량용 센서에 더 적합한 능동형 라이다 기술에 주목한다.
능동형 라이다 기술은 두 가지 요소, 즉 검출에 응용되는 파장과 검출기의 구성형태에 따라서 크게 4가지 유형[(그림 3) 참조]으로 구분이 가능하다. 또한, 제시된 기술그룹들은 허용 가능한 입사 배경광 수준, 빛의 조사방식, 조사되는 빛의 수준, 그리고 검출기의 민감도(Sensitivity)에 따라서 3차원 영상획득이 실내용으로 제약이 되는 경우도 있고, 실내외 겸용으로 사용이 가능한 경우도 있다.

3차원 라이다 센서가 실외용으로 성능상 제약 없이 활용되기 위해서 해결되어야 할 가장 큰 문제점 중 하나는 태양광으로 인한 조도 변화에 대한 대응이다. 일반적으로 직사광선에 닿는 표면의 밝기는 최대 7~8만 lux 수준에 해당하며 라이다 센서가 야외에서 문제없이 동작하기 위해서는 이러한 조도에서도 반사된 레이저 신호를 안정적으로 검출할 수 있도록 개발되어야 한다. 이를 위해서는 기본적으로 광 검출기의 감도가 우수해야 할 뿐만 아니라, 배경광에 대한 대책이 수립되어야 하고, 또한 빛을 조사하는 파워가 배경광에 의하여 발생하는 노이즈 보다 더 큰 신호를 확보할 만큼 충분한 신호대잡음비(Signal-to-noise ratio)를 확보해야 한다. 특히 빛을 조사하는 광 송광부에서 출력되는 광 파워는 시각안전 등급 Class 1을 만족하고, 최종 라이다 모듈의 시각안전성이 확보될 수 있도록 구성되어야 한다.
라이다 기술의 구성 요소에 따라서 회전하는 구조체를 가진 회전형 라이다 기술, 광 검출기를 어레이로 구성하여 반사된 파형의 시간차이를 어레이로 인식하는 어레이형 라이다 기술, 그리고 마지막으로 두 가지 방식의 단점을 보완한 스터드 라이다 기술로 나누어 설명을 진행한다. 설명의 편의를 위하여 어레이형 라이다 기술의 경우 이용되는 광 검출기의 종류에 따라 화합물과 실리콘 방식으로 분리하였다.
1) 회전형 라이다 기술
라이다에 응용되는 파장은 (그림 3)에서 구분된 바와 같이 시각안전파장으로 알려진 1,550nm 대역과 실리콘 광 검출기를 이용할 수 있는 850nm 및 905nm 대역의 부근을 이용하는 기술로 나누어진다. 일반적으로 상용 광원 부품이 많이 나와 있는 830~850nm 대역과 905nm 대역이 이용되는데, 이 대역은 가시광선 대역에서 벗어나 있어 눈에 보이지 않으면서도 화합물 광 검출기보다 상대적으로 저렴한 가격의 실리콘 광 검출기를 이용할 수 있는 장점이 있다. 하지만 일반적으로 해당 파장 대역에서는 실리콘 광 검출기의 공정 최적화를 거쳐도 광 검출 효율이 5% 미만 수준으로 떨어져서 일반 가시광선을 이용하는 실리콘 광 검출기의 성능에 크게 미치지 못하는 수준이다.
이러한 단점에도 불구하고 저렴한 방식으로 라이다 모듈을 구성할 수 있어서 상용화 및 응용이 가장 활발한 방식이다. 그러나 실제 응용에서는 앞서 언급한 이유로 검출성능이 낮아서 탐지거리가 줄어드는 것이 일반적인데, 이를 억제하기 위해서는 송광 신호를 크게 하거나, 수광되는 신호를 크게 하려고 송광되는 빔의 퍼지는 정도를 최대한 줄이는 방식이 이용된다.

송광신호를 키우는 것은 시각안전 문제로 한계가 있어 실제로는 빔 퍼짐 정도를 최대한 줄여서 목표물에 닿는 스팟을 줄이는 방식을 활용하고, 이 스팟을 하나의 광 검출기로 검출하는 방식을 이용하여 검출거리를 반사율 90%에서 100미터 내외까지 증가시킬 수 있다. 결국, 실제 구현은 송광되는 빔의 크기를 일정한 수준으로 유지되는 상태(collimated beam)로 다수의 레이저를 수직방향으로 배치하여 송광하고, 이 빛에 쌍을 이루는 다수의 수광 채널을 두어 이를 수평 방향으로 회전함으로써 100미터 내외의 3차원 영상 확보가 가능하다.
기술적으로 가장 간단하기 때문에 가장 많은 상용제품이 개발 및 판매되고 있다. 하지만 이 방식의 기술이 차량용으로 사용되기에는 두 가지 문제점이 있다. 첫째는 자율주행 수준이 높아질수록 중요해지는 수직해상도가 높아야 되는 경우, 송수광부 쌍을 송수광 렌즈 뒷면에 배치하기 때문에 전체 모듈의 부피가 급격하게 커지는 문제점이 있다. 두 번째는 송수광부와 본체 사이의 전기적인 연결을 유지하면서 회전을 해야 하는 방식으로 슬립링 등의 특성에 의하여 수명 및 센서동작 안정성의 개선이 필요하다.
2) 화합물 어레이형 라이다 기술
어레이형 라이다 기술은 수광부 픽셀을 N×M형태로 세로와 가로로 다수를 배치하는데 이 어레이의 배치가 바로 최종 3차원 영상 해상도의 기준이 되는 방식이다.
또한, 광 검출을 위한 수광부가 어레이로 배치되어 있기 때문에 송광부는 빛을 퍼트려서 보내는 방식을 주로 사용한다. 이때 실리콘 광 검출기가 검출할 수 있는 파장대역의 광 파워보다 1,000배 이상 높은 에너지를 사용하더라도 눈에 안정적인 1,550nm 파장 대역을 사용하는 경우, 앞서 설명한 바와 같이 시각안전 특징이 있어 비교적 넓은 영역의 탐지거리 확보가 가능하다. 하지만, 저렴한 실리콘이 아닌 상대적으로 고가의 화합물 광 검출기를 사용해야 하며, 검출신호의 병렬 처리를 위한 Readout IC(ROIC)도 동일하게 2차원 어레이 구조로 제작해야 하는 문제점이 있다. 또한, 픽셀 크기로 제한된 영역의 회로에서 픽셀 별로 발생하는 신호를 고속 및 저잡음으로 병렬 처리하여 거리 및 반사 신호의 세기 등을 추출하도록 해야 한다. 결국, 이러한 기술상의 제약조건과 높은 비용구도의 화합물 광 검출기 어레이 및 ROIC 제작의 어려움으로 인하여 최종적으로 차량용에 불리한 고가의 솔루션이 될 수밖에 없다.

또한, 이 방식[(그림 5a) 참조]은 앞서 언급한 바와 같이 빔을 퍼트리는(diffuse) 방식으로 인하여 상대적으로 높은 레이저 파워(피크파워 기준 약 1MW)를 필요로 하므로 내구성 및 프레임 레이트 개선 등에 한계를 가지게 된다. 이러한 고출력 광원의 문제를 해결할 수 있는 방법으로 2차원 화합물 광 검출기 어레이를 단일광자 광 검출모드(Geiger-mode, 가이거모드)로 활용하는 방법이 있다[(그림 5b) 참조]. 이 방식의 경우 단일 광자 수준의 낮은 광 수신 파워로도 검출이 가능하여 고출력 레이저 광원이 필요하지 않으며, 고출력 레이저로 인하여 발생할 수 있는 단점을 보완할 수 있다.
하지만 단일광자를 검출하기 위한 방법인 가이거모드 자체가 가지는 고유의 노이즈원인 Dark count 및 After pulsing 효과는 획득된 3차원 영상에 심각한 노이즈 발생원으로 작용하여 통계적 데이터 처리와 같은 충분한 신호처리를 해야만 실제 차량용으로 응용할 수 있어 이에 대한 대책이 필요하다.
3) 실리콘 어레이형 라이다 기술
앞서 설명된 바와 같이 화합물 어레이 방식은 화합물 어레이 및 ROIC로 인하여 저가형 솔루션으로 만들기에는 한계가 있다. 이러한 문제에 대한 해법으로 제시되고 있는 방법 중 하나가 저렴한 실리콘 광 검출기 어레이를 활용하는 것이다. 이 방법은 기존의 Complementary Metal-Oxide-Semiconductor(CMOS) 이미지 센서 또는 Charge Coupled Device(CCD) 비젼 센서에 존재하는 픽셀을 변형하여 아날로그 또는 디지털 방식으로 변조된 빛을 조사한 후 수광되는 빛의 상대적인 위상을 추출하도록 활용한 방식이다.
이 방식은 실리콘에서 흡수가 가능하도록 하기 위해 응용파장을 830~905nm 대역으로 두어야 하고, 따라서 시각에 안전하지 않은 문제점을 안고 있기 때문에 1550nm 파장과는 달리 사용이 가능한 최대 광 파워가 매우 제약적인 것이 특징이다. 하지만 기존의 이미지센서 칩들과 같이 다양한 CMOS 회로 기법 및 신호처리 기법을 이용하여 최대한 저잡음 상태에서 검출이 가능하도록 CMOS 픽셀 및 CCD 픽셀 자체를 최적화하여 탐지거리를 연장할 수 있다.
이 방식의 가장 큰 문제점으로 지적되는 부분은 높은 입사 배경광 잡음에 의하여 픽셀이 쉽게 포화(saturation)된다는 것이다. 실제로 이러한 문제점으로 인하여 전 세계적으로 개발된 모든 CMOS/CCD 실리콘 Time-Of-Flight(TOF) 센서는 적절한 광학 필터를 사용하는 조건에서도 야외기준 탐지거리 10m 수준을 넘지 못하는 상황이고, 태양광 아래에서도 최소 20m, 최대 100m 이상의 탐지성능을 확보해야 하는 자율주행차/스마트카에 적용하기에는 성능상의 제약이 많이 따른다.
4) 한국 독자 구도의 스터드 방식 라이다 기술
지금까지 검토한 바와 같이 다양한 방식의 3차원 라이다 기술이 존재하지만, 각각의 기술은 고유의 문제점이 존재하기 때문에 추가적인 개선이 필요한 상황이다. 각 기술분야의 선두를 지키고 있는 각국의 대표기업은 보유기술에 대한 기술적인 선점을 강화해 가면서 동시에 문제점 해결을 위해서 노력하고 있다.
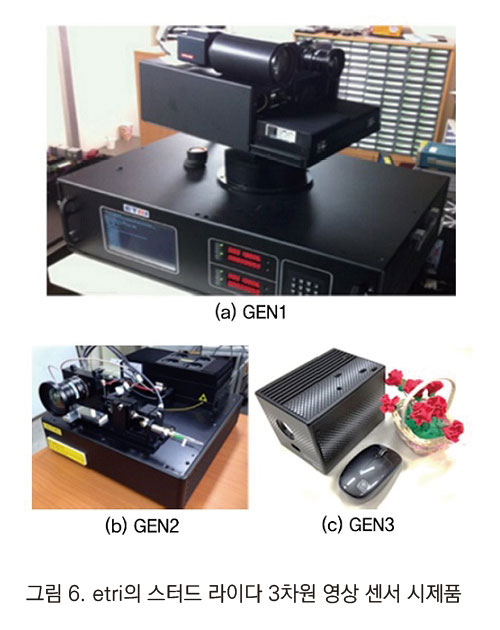
이러한 상황에서 한국전자통신연구원은 기존 기술의 문제점을 독자적인 기법을 이용하여 원천적으로 해결하기 위해 국내 독자 기술인 STatic Unitary Detector (STUD, 스터드) 방식을 세계 최초로 제안하였다. 이 기술은 고해상도의 3차원 영상품질을 낮은 비용으로 확보하는데 최적인 솔루션으로 평가되고 있는데, 센서 배치 구조에 따라 자율주행차용 3차원 영상 센서뿐만 아니라, 경량 저전력이 필요한 드론용 센서, 내구성/내진 동성이 필요한 국방 경계 감시 로봇, 초소형 IoT 센서 등에 적합하도록 확장 및 응용이 용이하다. 지금까지 연구는 일반적으로 요구되는 국방용 및 민수용 애플리케이션을 타겟으로 다양한 연구시제품을 확보해 왔으며, 최근 글로벌 라이다 센서 시장의 경쟁이 더욱 치열하게 확대되고 있어, 차세대 라이다 요소기술 개발 및 추가적인 핵심 IPR 확보를 진행해 가고 있다.
이 중에서 세미눈(SemiNoon)이라 명명된 GEN3 모델은 3세대 연구시제품으로 현재 판매되고 있는 상용 라이다 제품 수준인 100×100×150mm 크기로 소형화를 이룬 모델이다. 이 모델을 통해 획득이 가능한 검출성능은 최대 전방 40도, 200미터 범위에 대하여 가로 320 픽셀, 세로 240픽셀의 해상도로 3차원 영상 및 일반영상(반사세기영상)의 획득이 가능하며, 이는 3차원 해상도 및 공간 분해능 관점에서 세계 최고 수준이다.
세미눈 모델은 검출되는 3차원 정보(픽셀 별 거리 및 반사정보)의 포인트 클라우드를 UDP 패킷 포맷으로 전송하며, 자체 포인트 클라우드 전용 디스플레이 프로그램에 의하여 획득된 3차원 입체영상 및 일반영상을 실시간으로 확인할 수 있다.
기본적으로 스터드 방식은 센서 모듈 구성의 유연성이 기존의 다른 라이다 기술과 비교하여 매우 높아 회전없이 광각/360도 탐지형태로도 간단하게 구현할 수 있으며, 구동 중에도 해상도 임의조절이 자유롭고, 센서모듈의 소형화에도 매우 유리한 특징을 갖고 있어 향후 추가적인 연구시제를 통해 다양한 분야로 응용될 예정이다.
향후 전망
라이다 센서 기술은 소형화, 저가격화에 집중되어 있는 양상이다. 또한 기존 고가의 모터 회전 방식 대신 일정한 시야각만 확보하는 무회전 라이다 제품도 공개되고 있는데, 이 역시 높은 사양을 추구하기 보다는 일정 사양을 준수하면서 구조를 단순화해 가격 경쟁력을 확보하고 최대한 작게 만들어 대량생산이 가능하도록 라이다 개발에 중점을 두고 있다.©
[참조]
자율주행차 및 스마트카용 라이다 3차원 영상센서 기술개발 동향 및 전망, 한국전자통신연구원
라이다 센서 기술 동향 및 응용, 한국전자통신연구원
라이다 기술동향과 산업전망, 산업기술평가관리원





![[#HM26] 협동로봇의 진화, ‘보조’ 넘어 ‘산업용 핵심’으로](https://icnweb.kr/wp-content/uploads/2026/05/HM26_fanuc_cobot-900web.png "[#HM26] 협동로봇의 진화, ‘보조’ 넘어 ‘산업용 핵심’으로")















")







{kind=link}